资料内容:
1 数据采集及预处理
由于实验数据来源于真实交通场景和不同的传感
设备, 所以数据预处理的第一个任务是将每个传感设
备采集的数据进行滤波、分段处理, 第二个任务是进
行时间戳对齐, 并按时间窗口提取具有同一标签的数据.
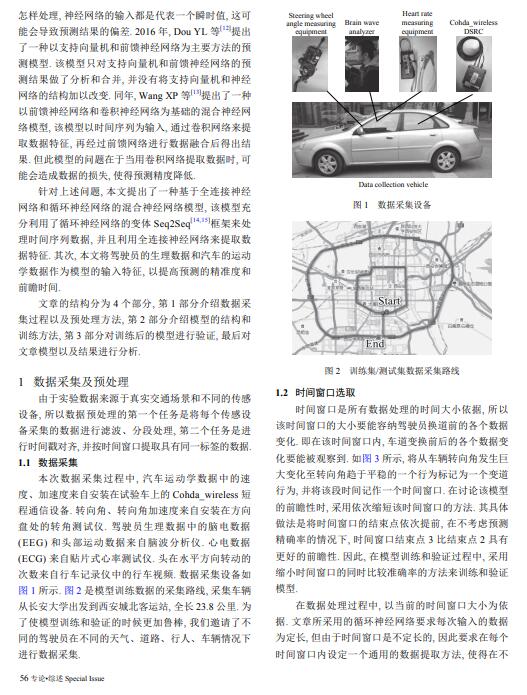
1.1 数据采集
本次数据采集过程中, 汽车运动学数据中的速
度、加速度来自安装在试验车上的 Cohda_wireless 短
程通信设备. 转向角、转向角加速度来自安装在方向
盘处的转角测试仪. 驾驶员生理数据中的脑电数据
(EEG) 和头部运动数据来自脑波分析仪. 心电数据
(ECG) 来自贴片式心率测试仪. 头在水平方向转动的
次数来自行车记录仪中的行车视频. 数据采集设备如
图 1 所示. 图 2 是模型训练数据的采集路线, 采集车辆
从长安大学出发到西安城北客运站, 全长 23.8 公里. 为
了使模型训练和验证的时候更加鲁棒, 我们邀请了不
同的驾驶员在不同的天气、道路、行人、车辆情况下
进行数据采集.
1.2 时间窗口选取
时间窗口是所有数据处理的时间大小依据, 所以
该时间窗口的大小要能容纳驾驶员换道前的各个数据
变化. 即在该时间窗口内, 车道变换前后的各个数据变
化要能被观察到. 如图 3 所示, 将从车辆转向角发生巨
大变化至转向角趋于平稳的一个行为标记为一个变道
行为, 并将该段时间记作一个时间窗口. 在讨论该模型
的前瞻性时, 采用依次缩短该时间窗口的方法. 其具体
做法是将时间窗口的结束点依次提前, 在不考虑预测
精确率的情况下, 时间窗口结束点 3 比结束点 2 具有
更好的前瞻性. 因此, 在模型训练和验证过程中, 采用
缩小时间窗口的同时比较准确率的方法来训练和验证
模型.
在数据处理过程中, 以当前的时间窗口大小为依
据. 文章所采用的循环神经网络要求每次输入的数据
为定长, 但由于时间窗口是不定长的, 因此要求在每个
时间窗口内设定一个通用的数据提取方法, 使得在不

